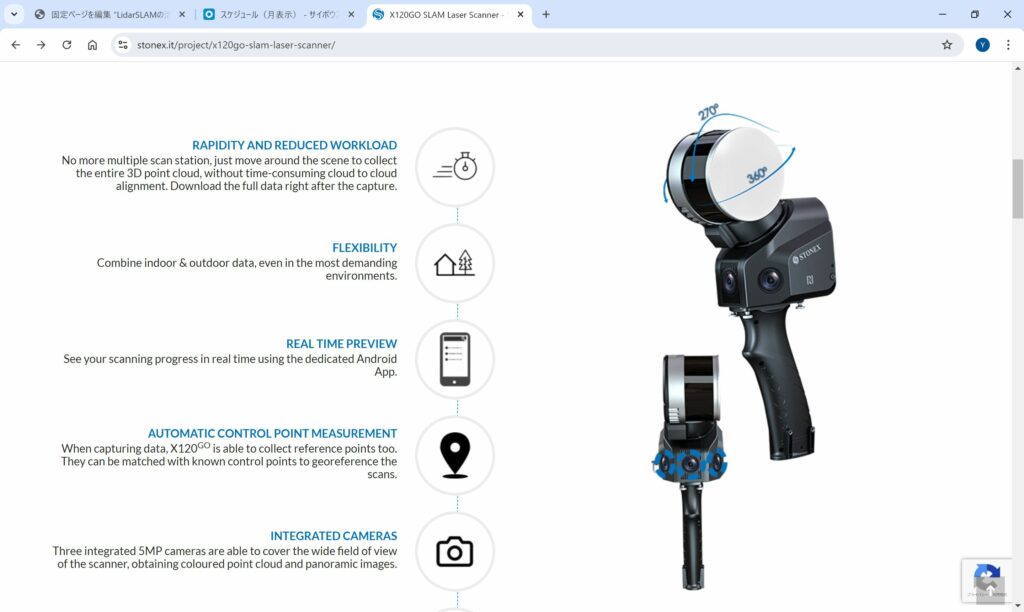
歩きながら全方位を計測
LidarSLAMは、自己位置推定と同時に周囲の点群を作成する技術です。
手持ち型や装着型のレーザスキャナを使用し、歩行しながら計測できる特性を活かして、比較的狭い範囲を対象とした測量での利用が期待されている技術です。
GNSS 測位を利用することなく移動経路の位置情報が得られ、かつ、リアルタイムで空間情報を把握できる特徴があり、屋内や地下空間などのインドアマッピングが可能になるだけでなく、屋外の測量においても活用できる可能性がある技術です。
ちなみに、iPhone(機種は限定されると思います)に計測アプリがありますが、これにはLidarスキャナが使用されています。

SLAM(Simultaneous Localization and Mapping:自己位置推定同時地図作成)技術は、センサが認識する範囲における周辺環境の地図の作成と自己位置の推定を同時に行う計算手法です。
産業機器では、マシンビジョンを利用したロボットのリアルタイム制御に用いられており、効率的な移動計測技術としても注目されています。
IMU(Inertial Measurement Unit:慣性航法装置)や DMI(Distance Measuring Instrument:走行距離計)と同じ自律航法の一種とも言えますが、自らの挙動を内界センサで検知するのではなく、外界センサによって得られた結果から、計算を行うことで自らの位置を推定します。
外界センサとしてレーザ等が用いられているレーザ主体のものを LidarSLAM と呼び、移動しながら計測したレーザ計測結果は、測量成果としての利用が見込まれています。
車両搭載型レーザや航空レーザなどの従来の移動体による測量技術は、GNSS 測位等によって自己位置を特定した後、距離や角度を計測することで対象物の座標を得ます。一方、LidarSLAM の場合は、GNSS 測位を利用することなく、移動しながら周辺の地形や地物の特徴点を見つけ出し、それらの見え方や測定距離の変化を把握しながら、自らの移動量と角度から移動軌跡を推定します。
(LidarSLAM 技術を用いた公共測量マニュアル(国土地理院より部分引用))

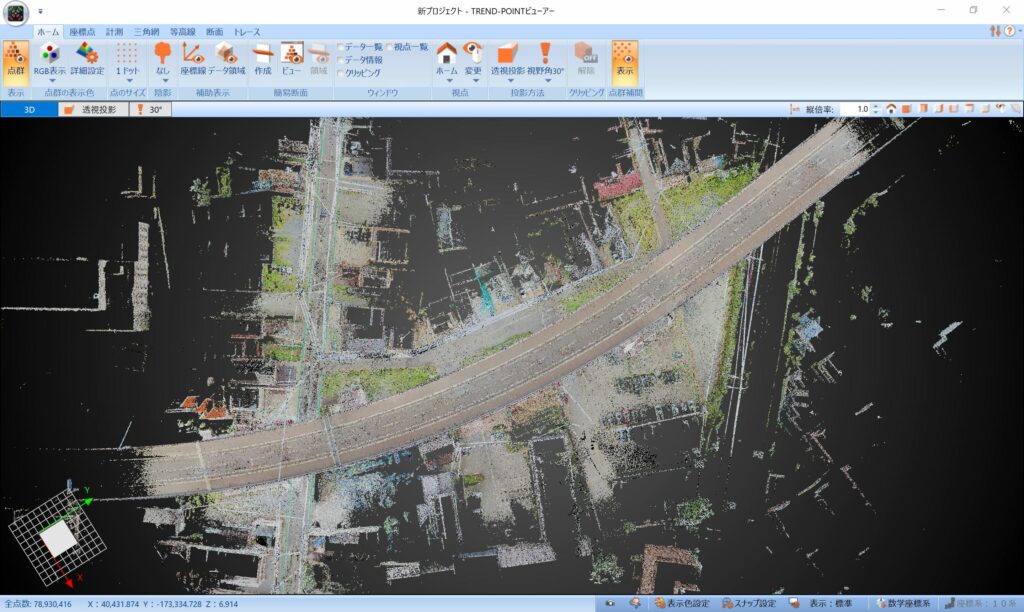
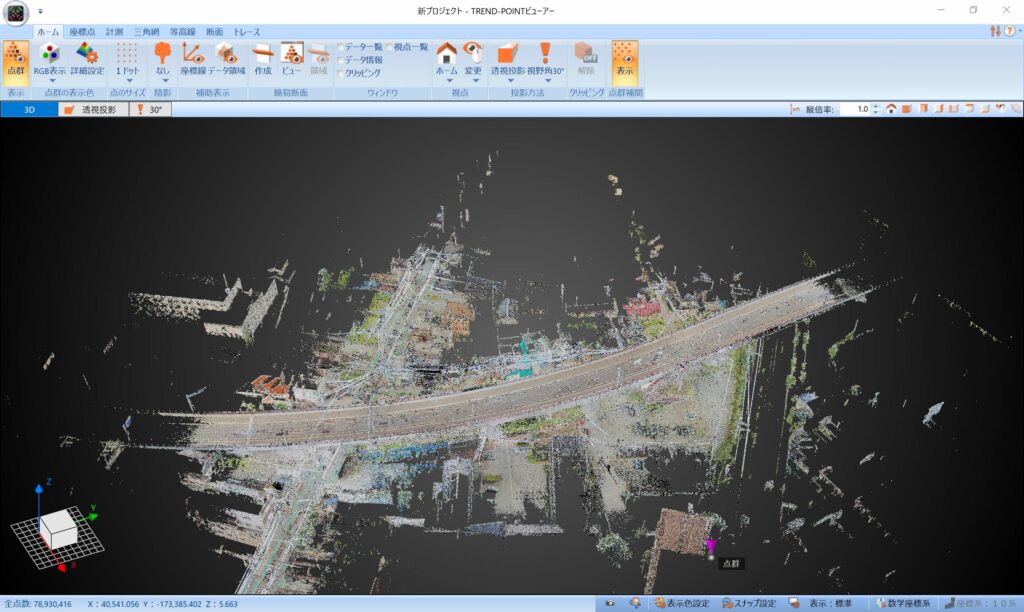
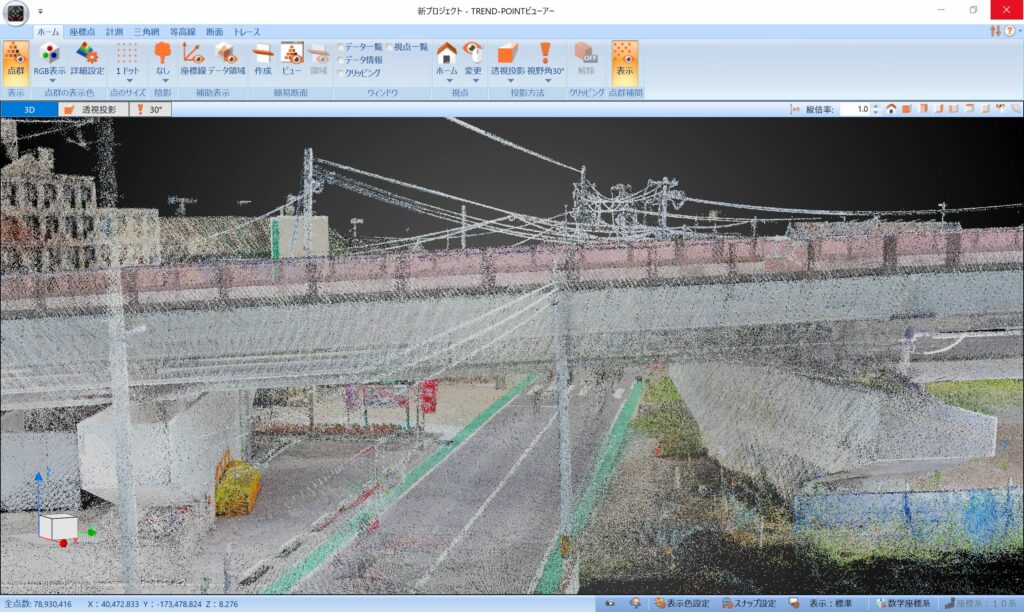
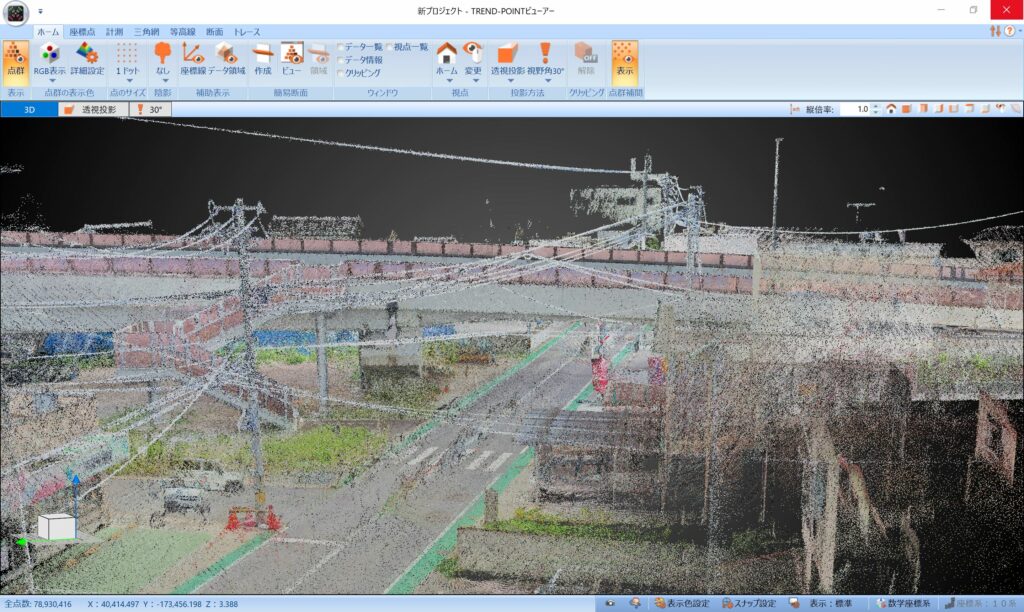
計測事例